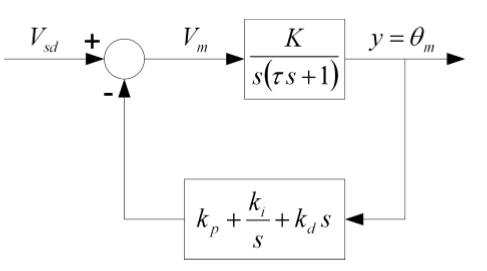
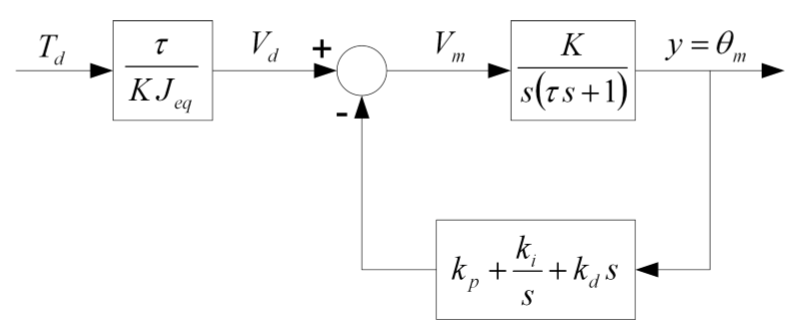
PID closed-loop block diagram to a simulated disturbance
6
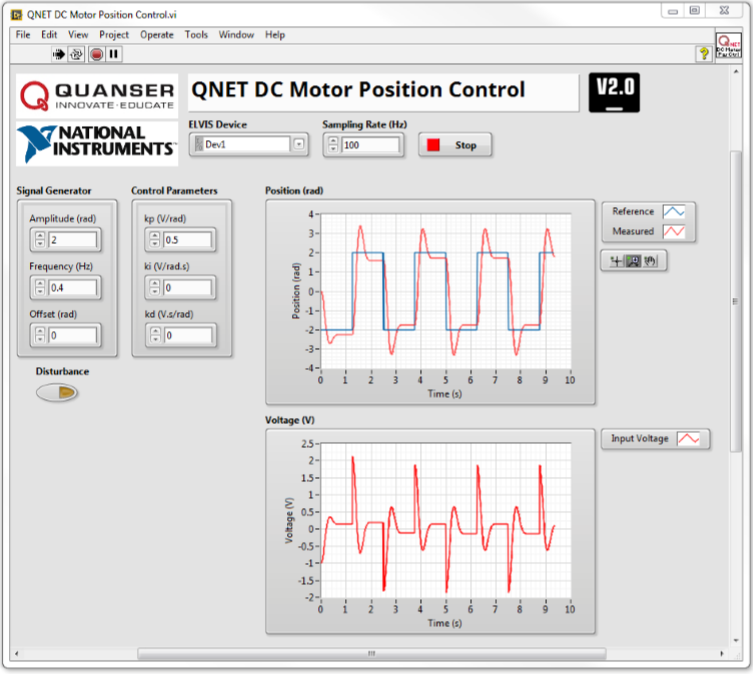
Tracking and Disturbance Rejection
This is lab 6 of 6 in the course
by Quanser Inc.
Students track triangular signals and use PID (proportional-integral-derivative) control to reject disturbance. Students learn how integral control is used to combat disturbance in tracking a signal. The position of the motor is controlled under different PID gains to maximize tracking performance.