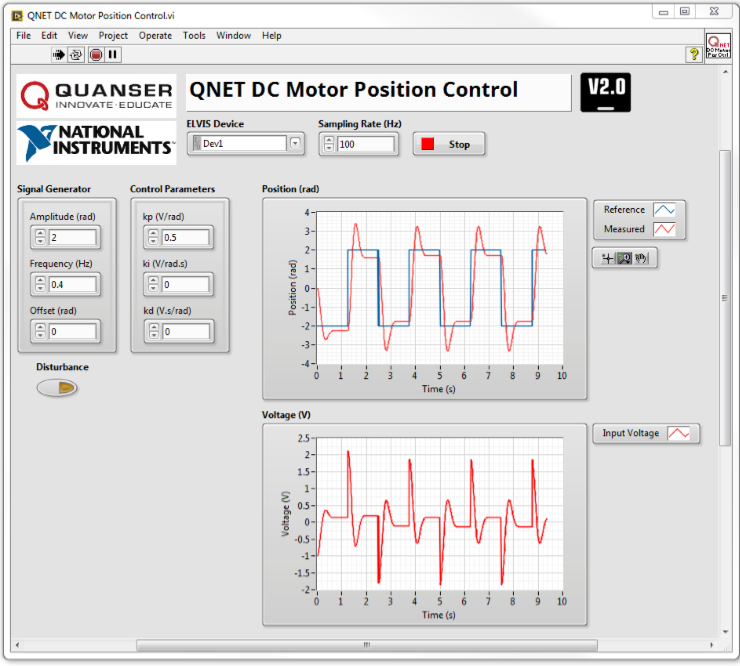
Students use this virtual instrument for QNET DC Motor position control

2
Qualitative PD Control
This is lab 2 of 6 in the course
by Quanser Inc.
Students learn how to use a PD (proportional-derivative) compensator to control motor position. This lab introduces the fundamentals of deriving a closed-loop transfer function to define the motor position system. Students learn how the proportional and derivative gains effect the control system by modifying the respective gain values.