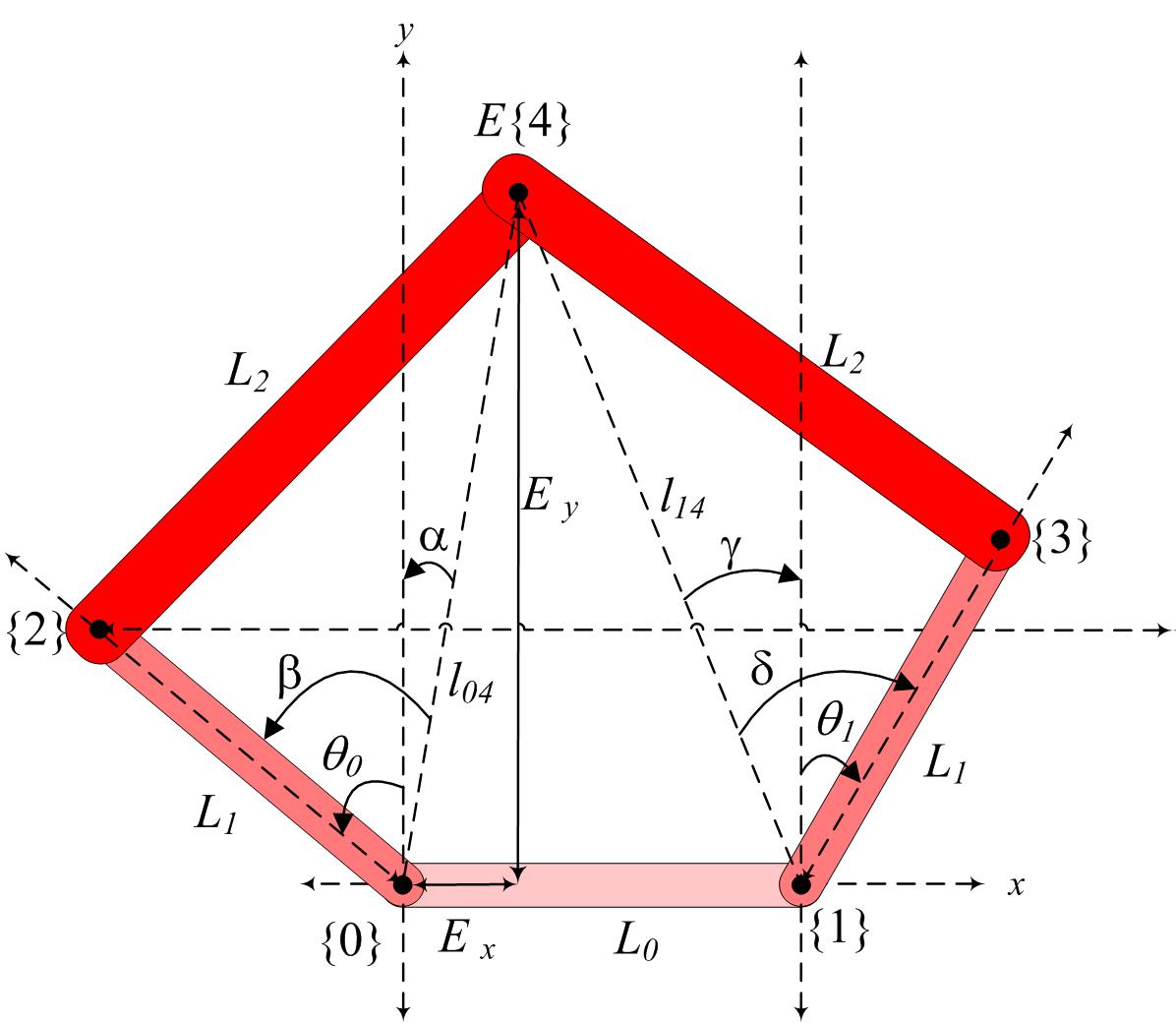
QNET Mechatronic Systems kinematic diagram.

5
Inverse Kinematics
This is lab 5 of 12 in the course
by Quanser Inc.
In this lab, students will derive inverse kinematics equations for determining the angular position of bars of a five-bar linkage given the position of an end effector. They will then model this in LabVIEW, and validate the model using encoder information from the Mechatronic Systems board. To develop the knowledge of these topics, students will review background information and perform in-lab exercises to learn essential skills. Required: Must complete previous labs before starting this lab.