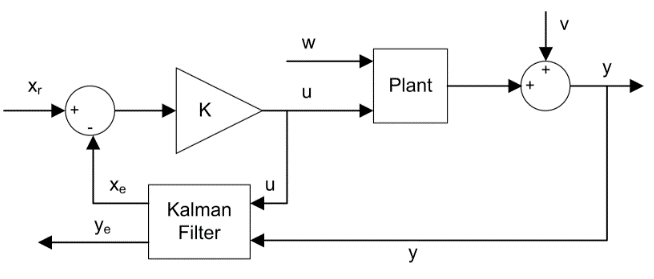
Block Diagram of Linear Quadratic Gaussian (LQG) Controller



4
Lab 4: 2-DOF Attitude LQG Design
This is lab 4 of 4 in the course
by Quanser Inc.
In this lab, students will learn about the applications of an Inertial Measurement Unit (IMU), which is usually a combination of accelerometers and a gyroscope with coincident axes, and its drawbacks. Students will also be introduced to the Linear Quadratic Gaussian controller, a combination of an LQR to find the optimal control gains and a Kalman filter to estimate the state in a noisy system. Such a combination is common in various aerospace systems. In this lab, students will apply the concepts of the Linear Quadratic Gaussian controller to the 2-DOF Aero configuration.