


7
Inertial Measurement
This is lab 7 of 9 in the course
by Quanser Inc.
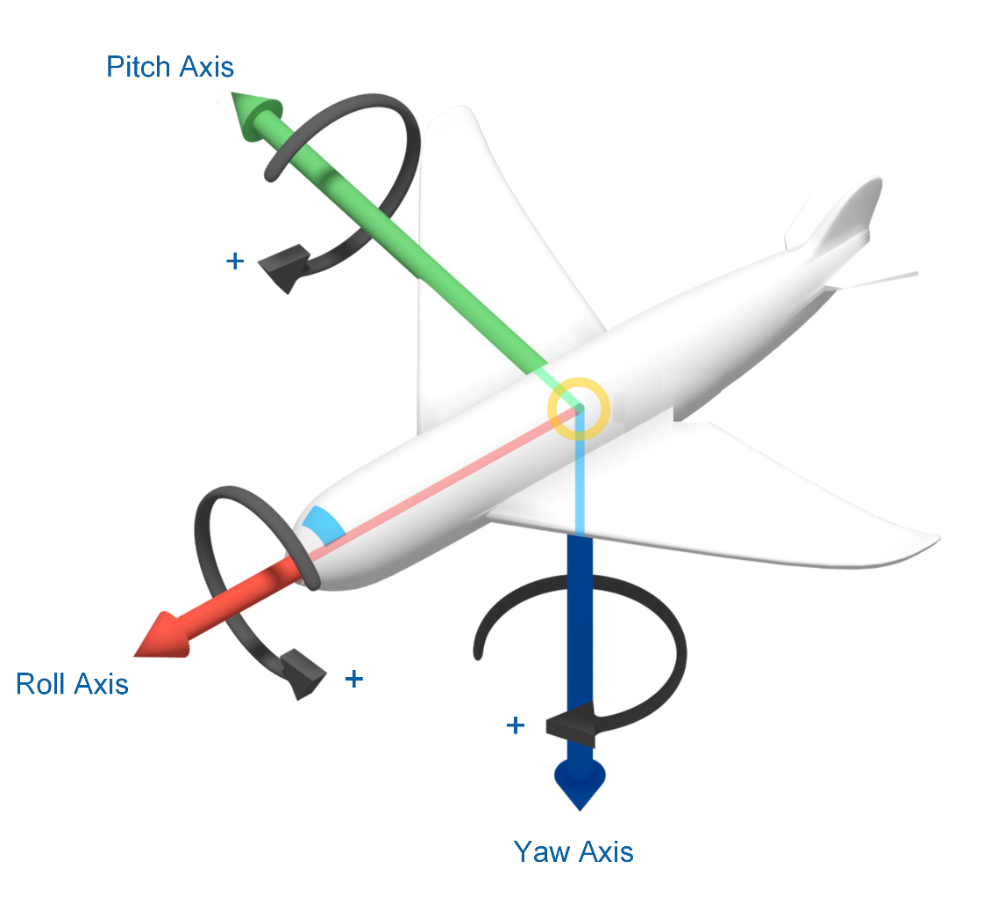
This lab explores acceleration, rotation, and magnetic field measurements using an Inertial Measurement Unit (IMU) sensor. Students will measure the output of the accelerometer and gyroscope sensors in the IMU, and determine roll, pitch, and yaw. Finally, students will approximate the earth’s magnetic field direction using magnetometer measurements.